ROSでオドメトリフリーなSLAMを動かしてみよう
開発環境
OS
- Ubuntu12.04
ROS ver
- Hydro
深度センサ
- Xtion Pro Live
OpenNIはライセンス的に今度どうなっていくのか非常に不安ですし、ついにXtionが供給終了になりましたね…
なんか久しぶりにXtionで遊びたくなってきたのでhector_slamを使って地図でも描かせようと思います。
hector_slamはURG等の高レートが出せるLRFを生かしてオドメトリフリーなSLAMを実現します。
更にロール軸とピッチ軸のずれに対しても頑健に作られており、ロバストな動作が期待できる点で優れています。
Xtionはスペック的に心配ですがどこまでできるのか確かめてみましょう。
まず必要なものをインストール
sudo aptitude install ros-hydro-openni2-launch
sudo aptitude install ros-hydro-hector-slam-launch
sudo aptitude install ros-hydro-depthimage-to-laserscan
view_framesでopenni2起動時のtfデータを可視化します。
rosrun tf view_frames
camera_linkがベースになっているようですのでそこにbase_frameを親フレームとして追加し、mapまでのフレームを関連付ける必要があります。
static_transform_publisherを使えば簡単ですね。 ROS便利すぎ!
変換後の図は以下のとおり
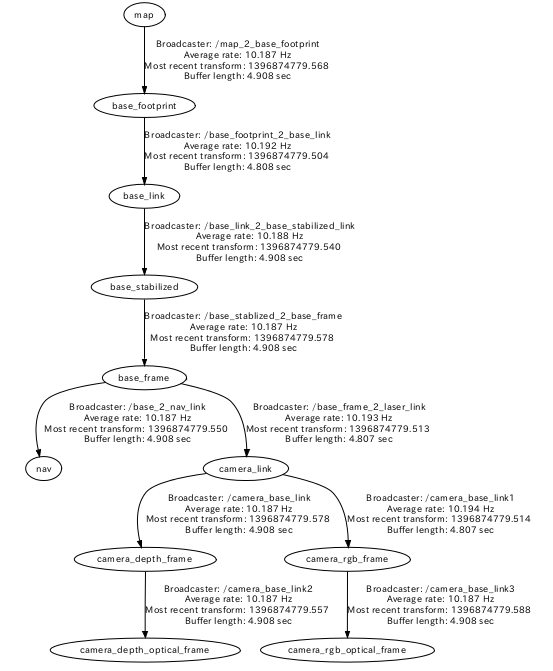
hector_slamを動かすにはLaserScanが必要なのでdepthimage_to_laserscanを用いて変換します。
下準備はこれだけ、後は使うだけです。
個別に起動するのは面倒なのでlaunchファイル作りました。
roslaunch hector_openni.launch
一応動作時のシステム図も載っけときます。
rqt_graph
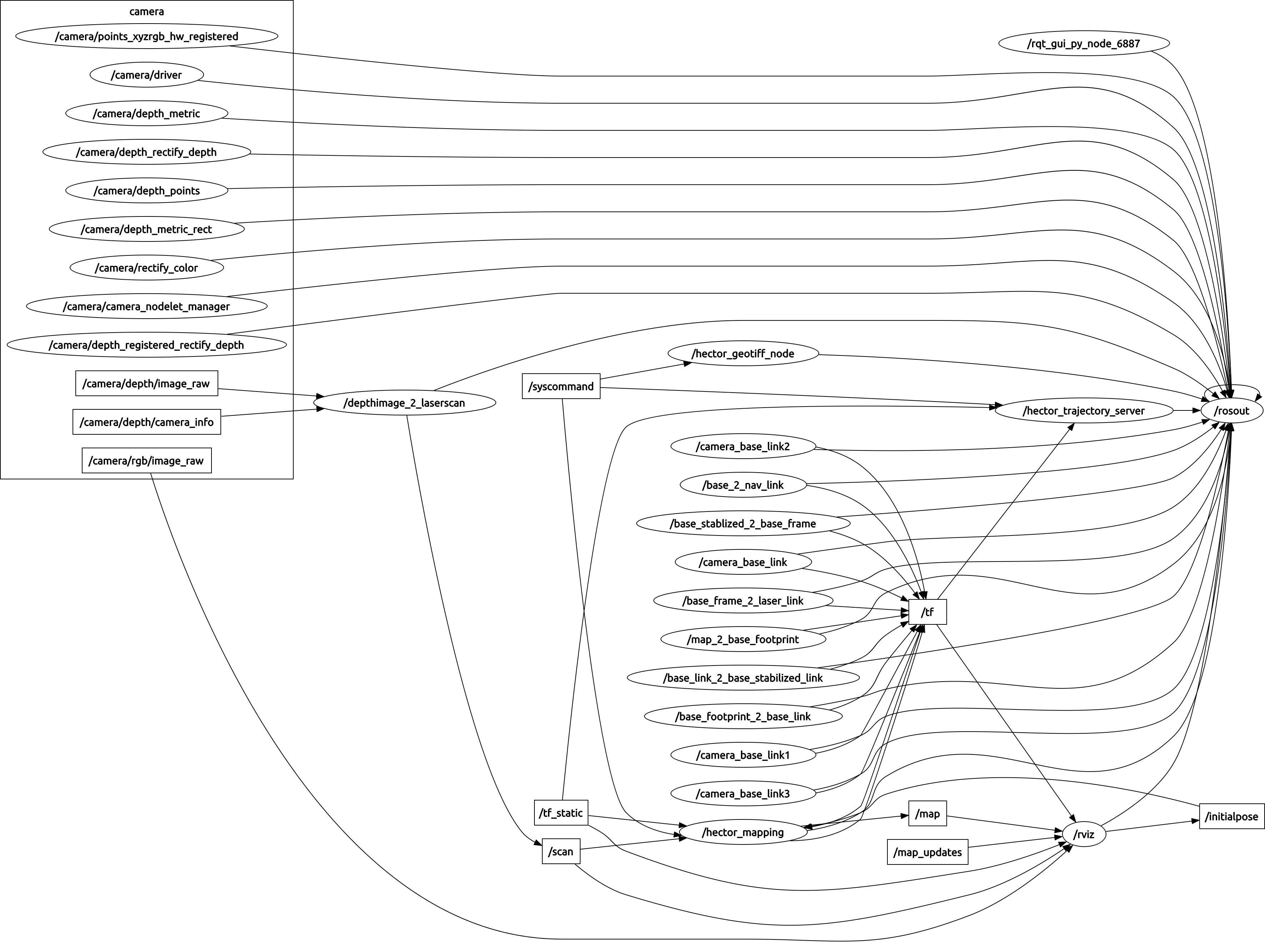
XtionとPCを用意すればこれだけで地図が描けます。
オドメトリ無しで綺麗に地図が描けるのはすばらしいのですがやはり広い空間で試してみるとうまくいかない…
作成者もKinectとXtionでは精度が出なかったためURGをお勧めすると言ってますから今度はそちらで試してみましょう。
blog comments powered by Disqus
Published
Category
ROSTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート