ジャイロセンサの制御方法(続き) dsPIC入門講座05
開発環境
基盤
- SPPBoard(dsPIC30F3014使用)
コンパイラ
- C30
ジャイロセンサ
- IMU3000
はじめに
以前、ジャイロセンサ(IMU3000)をdsPIC上で制御するための基礎知識について解説しました。
今回はIMU3000の通信仕様について軽く触れた後にdsPIC上で制御するサンプルプログラムを紹介します。
IMU3000とは?
3.3V駆動でx, y, z方向の3軸仕様でI2Cインタフェースをサポートしたジャイロセンサです。
IMU3000の通信方法
それではIMU3000の仕様書から必要な情報を読み取りましょう。
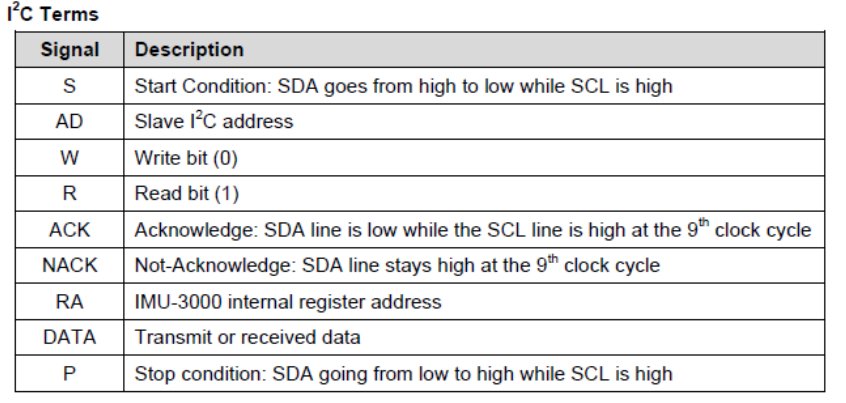
データ送信方式
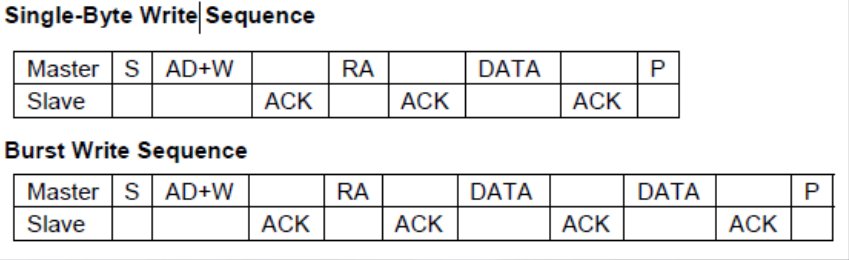
記号に関しては以下を参照
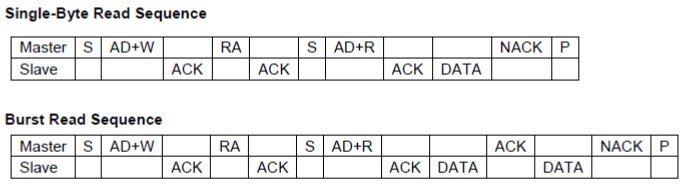
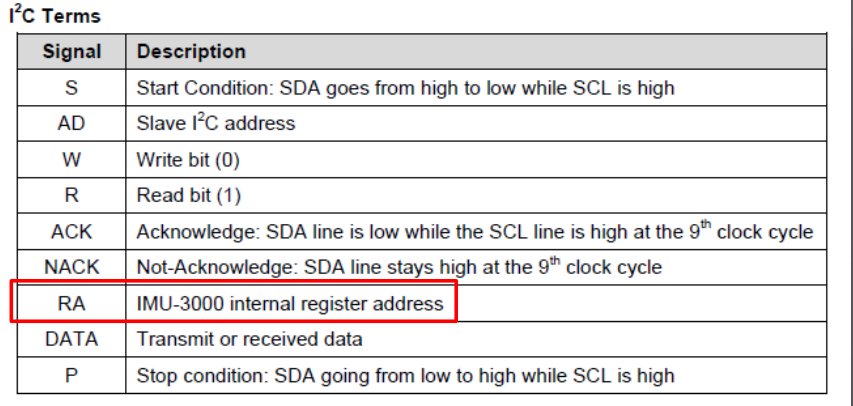
データ受信方式
レジスタ解説
ジャイロの値を取得する際にアクセスする必要があるレジスタについて解説します。
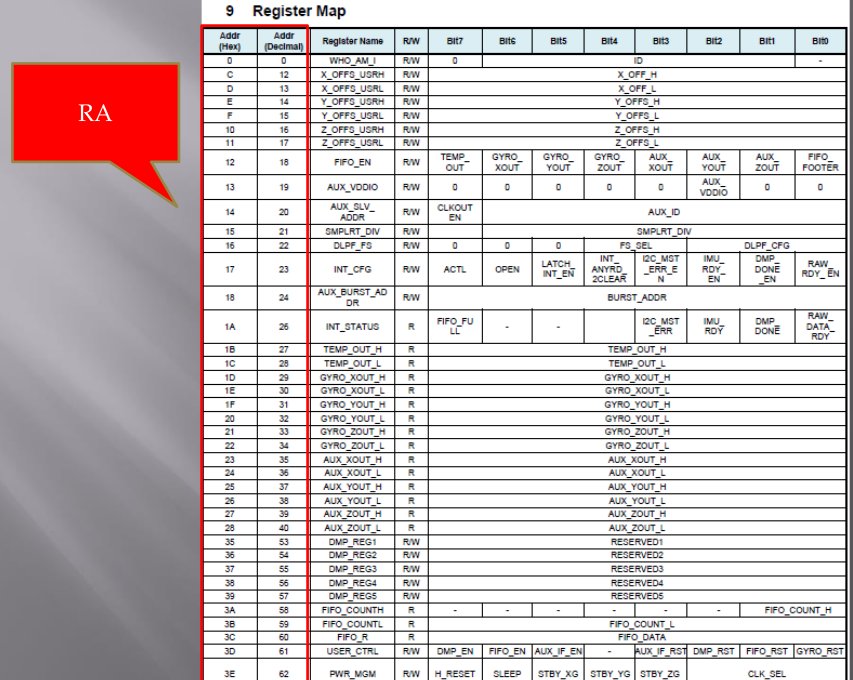
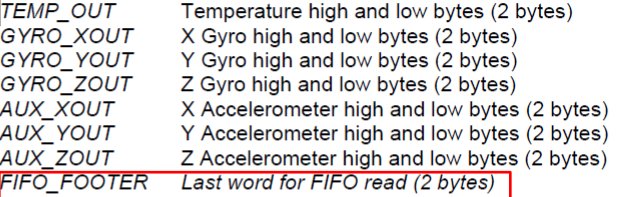
- Register 60
FIFO Dataレジスタにはレジスタ18で有効にされたデータが16ビットで格納されています。

- Register 18
FIFOレジスタに格納するデータを選択する
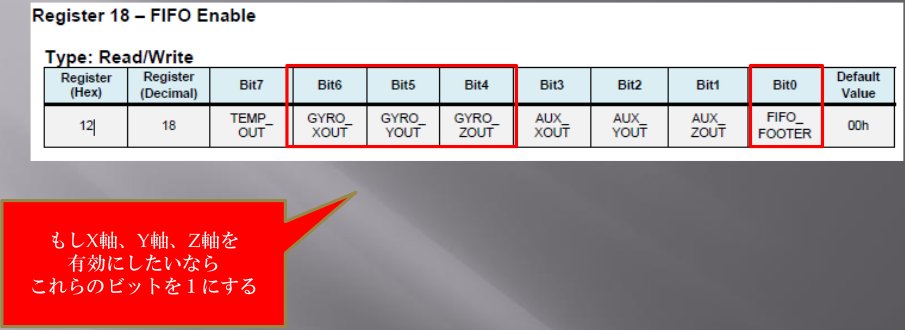
IMU3000のFIFOは最低でも1ワード読み出しできるものがないといけないのでそれを保証するのでFIFO_FOOTERです。
- Register 22
ジャイロのフルスケールレンジとサンプルレートを設定します。

フィルターとサンプルレートの設定する
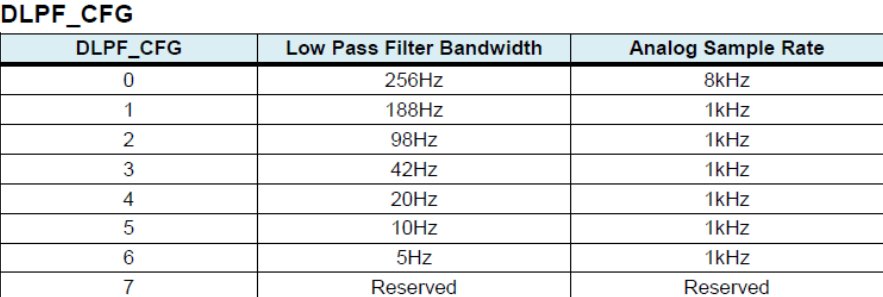

フルスケールレンジの設定する

- Register 21
サンプルレートを設定する


(注) 8ビットなので当然、SMPLRT_DIVは0 ~ 255の範囲で設定すること
- Register 61
使用したい機能はこのレジスタでリセットする

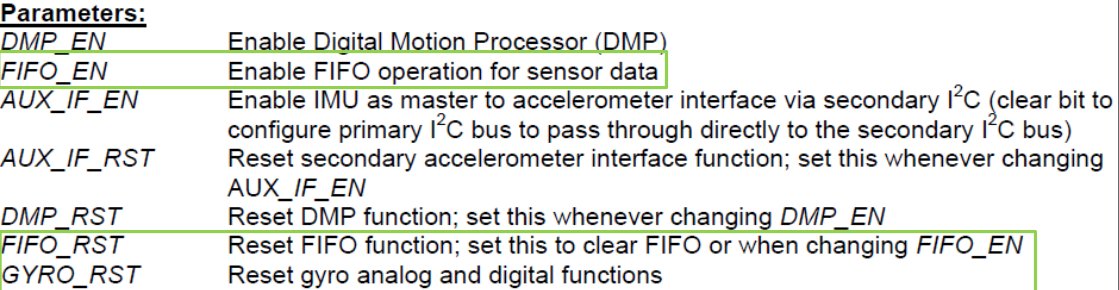
FIFO_ENとFIFO_RSTとGYRO_RSTは最低限設定する必要があります。
IMU3000の制御関数を作ろう
初期化関数
I2C I2CInitFunc(void){
I2C i2c;
static short first = TRUE;
if(first){
I2CBRG = 399;
I2CCON = 0b1001001001111101;
IDLE_I2C;
I2CADD = 0x09;
first = FALSE;
}
i2c.close = _CloseI2C;
i2c.write = WriteI2C;
i2c.read = ReadI2C;
i2c.SendDataToIMU = SendDataToIMU;
i2c.ReadDataFromIMU = ReadDataFromIMU;
return i2c;
}

- I2CBRG = 399
通信速度を設定 40MHz動作時に100kHzで通信
- I2CCON = 0b1001001001111101
I2Cの初期設定
- I2CADD = 0x09
スレーブとしてのアドレスを設定
データ送信用関数
static void SendDataI2C(I2CData data){
I2CTRN = data;
if(!I2CSTATbits.IWCOL){
while(I2CSTATbits.TRSTAT);
IDLE_I2C;
}
while(I2CSTATbits.TBF);
while(I2CSTATbits.ACKSTAT);
IDLE_I2C;
}
- I2CTRN = data
データ送信
- if(!I2CSTATbits.IWCOL)
書き込み衝突なしの場合
- while(I2CSTATbits.TRSTAT)
送信終了待ち
- while(I2CSTATbits.TBF)
I2CTRNが空になるまで待つ
- while(I2CSTATbits.ACKSTAT)
アクノリッジが返って来るまで待つ
アドレス送信関数
static void SendAddressI2C(I2CData address, char AddressType){
address = address << 1;
if(AddressType == SEND){
address &= 0b11111110;
}else{
address |= 0b00000001;
}
SendDataI2C(address);
}
スレーブへ送信する場合は最下位ビットを0に スレーブから受信する場合は最下位ビットを1にする。
IMU3000への送信関数
この関数は仕様書に書かれている以下の規則に従ったものです。
static void SendDataToIMU(I2CData I2CAddress, I2CData RegisterAddress, I2CData data){
I2CCONbits.SEN = 1;
IDLE_I2C;
SendAddressI2C(I2CAddress, SEND);
SendDataI2C(RegisterAddress);
SendDataI2C(data);
I2CCONbits.PEN = 1;
IDLE_I2C;
}
- I2CCONbits.SEN = 1
スタートコンディション発行
- SendAddressI2C(I2CAddress, SEND)
IMUアドレス+送信要求
- SendDataI2C(RegisterAddress)
レジスタアドレスを送信
- SendDataI2C(data)
レジスタへの書き込み
- I2CCONbits.PEN = 1
ストップコンディション発行
汎用送信関数
static void WriteI2C(I2CData address, I2CData data){
I2CCONbits.SEN = 1;
IDLE_I2C;
SendAddressI2C(address, SEND);
SendDataI2C(data);
I2CCONbits.PEN = 1;
IDEL_I2C;
}
IMU3000からの受信関数
この関数は仕様書に書かれている以下の規則に従ったものです。
static I2CData ReadDataFromIMU(I2CData I2CAddress, I2CData RegisterAddress){
I2CData buffer;
I2CCONbits.SEN = 1;
IDLE_I2C;
SendAddressI2C(I2CAddress, SEND);
SendDataI2C(RegisterAddress);
I2CCONbits.SEN = 1;
IDLE_I2c;
SendAddressI2C(I2CAddress, READ);
I2CCONbits.RCEN = 1;
while(I2CCONbits.RCEN);
I2CSTATbits.I2COV = 0;
buffer = I2CRCV;
IDLE_I2C;
I2CCONbits.ACKDT = 1;
I2CCONbits.ACKEN = 1;
IDLE_I2C;
I2CCONbits.PEN = 1;
IDLE_I2C;
return buffer;
}
SendAddressI2C(I2CAddress, SEND)
アドレス+送信要求
SendDataI2C(RegisterAddress)
レジスタアドレス送信
SendAddressI2C(I2CAddress, READ)
アドレス+受信要求
I2CCONbits.RCEN = 1
受信モードを有効化
while(I2CCONbits.RCEN)
有効化待ち
I2CSTATbits.I2COV = 0
オーバーフローなしにセット
buffer = I2CRCV
受信データを読み出し
I2CCONbits.ACKDT = 1
I2CCONbits.ACKEN = 1
NACKを出力
汎用受信関数
static I2CData ReadI2C(I2CData address){
unsigned char received_data;
I2CCONbits.SEN = 1;
IDLE_I2C;
SendAddressI2C(address, READ);
I2CCONbits.RCEN = 1;
while(I2CCONbits.RCEN);
I2CSTATbits.I2COV = 0;
received_data = I2CRCV;
IDLE_I2C;
I2CCONbits.ACKDT = 1;
I2CCONbits.ACKEN = 1;
IDLE_I2C;
I2CCONbits.PEN = 1;
IDLE_I2C;
return received_data;
}
IMU3000の制御関数を使ってみよう
int main(void){
int buffer[8];
int GyroX;
int i;
TRISA = 0x800;
TRISB = 0x1C7;
TRISC = 0x6000;
TRISD = 0x200;
TRISF = 0x0000;
I2C i2c = I2CInitFunc();
Lcd lcd = LcdInitFunc();
i2c.SendDataToIMU(GYRO, 0x12, 0x71);
i2c.SendDataToIMU(GYRO, 0x16, 0x09);
i2c.SendDataToIMU(GYRO, 0x15, 0x07);
i2c.SendDataToIMU(GYRO, 0x3D, 0x43);
while(1){
for(i=0; i < 8; i++) buffer[i] = (int)i2c.ReadDataFromIMU(GYRO, 0x3C);
GyroX = buffer[0] << 8 | buffer[1];
lcd.NumPuts(GyroX);
wait_msec(1000);
lcd.clear();
wait_msec(1000);
}
return 0;
}
- GYRO
IMU3000のアドレス
0x68であらかじめ定義している
- i2c.SendDataToIMU(GYRO, 0x12, 0x71)
FIFO Enable (GyroX + GyroY + GyroZ + FIFO_FOOTER)
- i2c.SendDataToIMU(GYRO, 0x16, 0x09)
DLPF, Full scale(500 deg/sec, LowPass->188Hz, ADサンプルレート1kHz)
- i2c.SendDataToIMU(GYRO, 0x15, 0x07)
SampleRate(125Hz)
- i2c.SendDataToIMU(GYRO, 0x3D, 0x43)
User Control (FIFO_EN = 1, FIFO_RST = 1, GYRO_RST = 1)
- for(i=0; i < 8; i++) buffer[i] = (int)i2c.ReadDataFromIMU(GYRO, 0x3C)
FIFOレジスタからX, Y, Z, FIFO_FOOTERを取得
- lcd.NumPuts(GyroX)
X軸の値をLCDに表示
- lcd.clear()
LCDの表示をクリア
以上でジャイロセンサから取得したX軸の値をLCDに表示するサンプログラムの完成です。
blog comments powered by Disqus
Published
Category
SPPBoardTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート