ジャイロセンサの制御方法 dsPIC入門講座04
開発環境
基盤
- SPPBoard(dsPIC30F3014使用)
コンパイラ
- C30
ジャイロセンサ
- IMU3000
はじめに
SPPBoard上でジャイロセンサ(IMU3000)を制御するプログラムを作成してみましょう。
IMU3000はI2Cインタフェースをサポートしているので、今回はI2C通信に関する基礎を解説したいと思います。
I2Cの基礎知識
I2Cとは
I2CはInter Integrated Circuit(集積回路間通信)の略です。
I2Cはデータ線が送受信兼用で1本しかありません。
つまりI2Cの構成はデータ線+クロック線の2本となります。
I2Cはシリアル通信
I2Cは同期式シリアル通信なので基準となるクロックパルスに合わせてデータ線へ信号を出力することになります。
マスタとスレーブ
クロックパルスを送信する側のことを「マスタ」、送られてきたクロックパルスに従って動作する側のことを「スレーブ」といいます。
また、I2Cではクロックを送信するのは必ずマスタ側です。
回路構成
I2Cのピンにはプルアップ抵抗が必要です。
これは様々なデバイスに対応するためにオープン・ドレイン端子となってためです。
I2Cのハードウェアは非常に単純です。
しかし、それを補うためプログラムは少し複雑になります。
通信のタイミング
I2Cのデータバス(SDA)はプルアップされているので初期状態で1です。
クロック(SCL)も同様です。
SCL: 1と0を交互に出力
SDA: SCLが1の時状態を変化させてはいけない
(注) 通信の開始と終了の時だけは例外です
SCLが1の時
SDA 1 -> 0 : スタート・コンディション(通信開始命令)
SDA 0 -> 1 : ストップ・コンディション(通信停止命令)
これらの命令を発行できるのはマスタだけです。
データの送受信をする際、スレーブ側から応答が返ってきたことを確認しながらデータをやりとりする仕組みになっています。
1. データの送受信の単位は8ビット
-> 送信終了時にマスタはSDAを1に戻して受信待機状態
2. スレーブが送信側になる
-> 1ビットだけ0を送信(アクノリッジ信号)
マスタは8ビット送信後アクノリッジが来るまで待っていることで、常に正しく通信することができます。
例としてマスタが受信でスレーブが送信の場合を考えます。
1. マスタが受信要求を出します
2. スレーブからアクノリッジが返ってきます
3. スレーが続けてデータを送信します
4. マスタはこれを受信し、8ビット区切りでアクノリッジを返します
(注) スレーブ側では8ビット送信後、マスタがアクノリッジを返すまで待機します。
アドレス送信の方式
I2Cでは一つのデータバスへ複数のデバイスを繋ぐことができます。
通信するスレーブはアドレスにより固定します。
1. スタートコンディション発行
2.「スレーブアドレス+要求」を送信
要求はそのデバイスへ(から)の送信(受信)
アドレス指定には10ビットアドレスモードと7ビットアドレスモードの二つです。
- 10ビットアドレスモード
8ビットを2回に分けて送信する
最初に送信する8ビットは上位5ビットは「1 1 1 1 0」 残り3ビットはアドレスの上位2ビット+送受信指定
次に送信する8ビットはすべてアドレスデータ
- 7ビットアドレスモード
7ビットのアドレス+送受信指定
送受信指定ビット
| -> 送信なら0
| -> 受信なら1
実際にプログラムにするにはどうするか
基本的にはC30コンパイラのI2C関連の関数を呼び出すだけでできます。
コンパイラのバグでそのままではライブラリがリンクされていませんので手動で行う必要があります。
その方法に関してはこのサイトを参照してください。
勉強のためここではあえてライブラリを使用せずにレジスタを直接操作することによりI2C通信を実現しジャイロセンサを制御してみましょう。
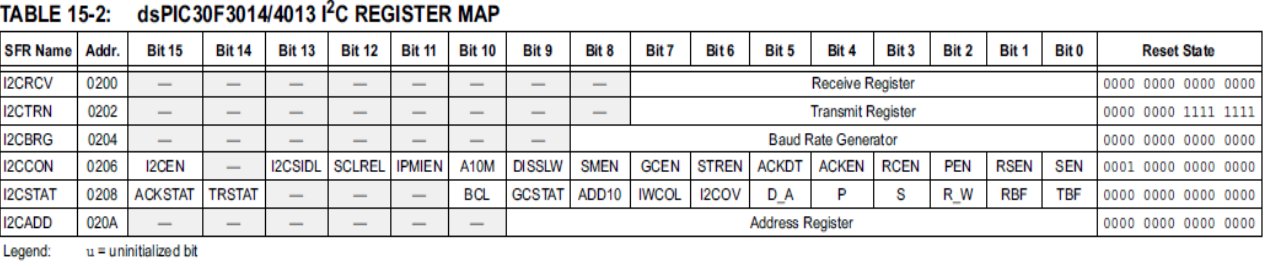
仕様書からレジスタマップを読み解こう
I2CCONレジスタ
I2CCON<15> I2CEN
[0]: I2Cモジュールを無効 [1]: I2Cモジュールを有効
I2Cモジュールを有効にした際マスタ、スレーブ両方有効になります。
I2CCON<13> I2CSIDL
[0]: アイドル時動作継続 [1]: アイドル時動作中止I2CCON<12> SCLREL
スレーブとして動作時[0]: SCLをLowに保持する [1]: SCLを自由に動作させるI2CCON<11> IPMIEN
[0]: Intelligent peripheral management interface(IPMI)を無効 [1]: IPMIを有効I2CCON<10> A10M
[0]: I2CADDは7ビットアドレスモード [1]: 10ビットアドレスモードI2CCON<9> DISSLW
[0]: スルーレート制御を有効 [1]: スルーレート制御を無効I2CCON<8> SMEN
[0]: SMBus入力のしきい値を無効 [1]: I/Oピンを使用可能にしSMBusの使用に準拠したしきい値が設定される。I2CCON<7> GCEN
スレーブとして動作時[0]: 一斉呼び出しアドレスを無効化 [1]: 一斉呼び出しアドレスがI2CRSRで受信された場合に割り込みを有効化I2CCON<6> STREN
スレーブとして動作時[0]: クロック延長のソフトと受信を無効化 [1]: クロック延長のソフトと受信を有効化I2CCON<5> ACKDT
マスタとして動作時[0]: 応答としてNACKを送信 [1]: 応答としてACKを送信I2CCON<4> ACKEN
マスタとして動作時[0]: 応答シーケンスを使わない [1]: SDAとSCLピン上でシーケンスの確認応答を開始し、ADKDTデータビットを送信I2CCON<3> RCEN
マスタとして動作時[0]: 受信シーケンスを有効化しない [1]: I2Cの受信モードを有効化I2CCON<2> PEN
マスタとして動作時[0]: ストップコンディションを無効 [1]: SDAとSCLを使ってストップコンディションを送信I2CCON<1> RSEN
マスタとして動作時[0]: Repeated START条件を有効化しない [1]: SDAピン及びSCLピンでRepeated START条件を開始I2CCON<0> SEN
マスタとして動作時[0]: スタートコンディションを送信しない [1]: スタートコンディションを送信する
I2CSTATレジスタ
I2CSTAT<15> ACKSTAT
マスタとして動作時[0]: アクノリッジをスレーブから受信 [1]: アクノリッジをスレーブから受信待ちI2CSTAT<14> TRSTAT
マスタとして動作時[0]: 送信終了 [1]: (8ビット+ACK)の送信中I2CSTAT<10> BCL
[0]: バス衝突なし [1]: バス衝突を検出I2CSTAT<9> GCSTAT
ジェネラルコールアドレスについて[0]: 受信していない [1]: 受信したI2CSTAT<8> ADD10
[0]: 10ビットのアドレス不一致 [1]: 10ビットのアドレス一致I2CSTAT<7> IWCOL
[0]: 書き込み衝突なし [1]: I2Cがビジー状態(I2CTRNに書き込みましょう)I2CSTAT<6> I2COV
[0]: オーバーフローなし [1]: I2CRCVレジスタが前のバイトを保持している間にバイトを受信したI2CSTAT<5> D_A
スレーブとして動作時、最後に受信したバイトは[0]: デバイスアドレス [1]: データI2CSTAT<4> P
[0]: ストップビットが最後に検出されなかった [1]: ストップビットが最後に検出されていたI2CSTAT<3> S
最後にスタートコンディションが[0]: 検出されなかった [1]: 検出された(もしかしたら反復スタートコンディション)I2CSTAT<2> R_W
スレーブとして動作時[0]: データ書き込み中 [1]: データ読み込み中I2CSTAT<1> RBF
[0]: 受信未完了(I2CRCVが空) [1]: 受信完了(I2CRCVがいっぱい)I2CSTAT<0> TBF
[0]: 送信完了(I2CTRNが空) [1]: 送信中 (I2CTRNがいっぱい)
検証した結果、TBFとTRSTATは同時に0になります
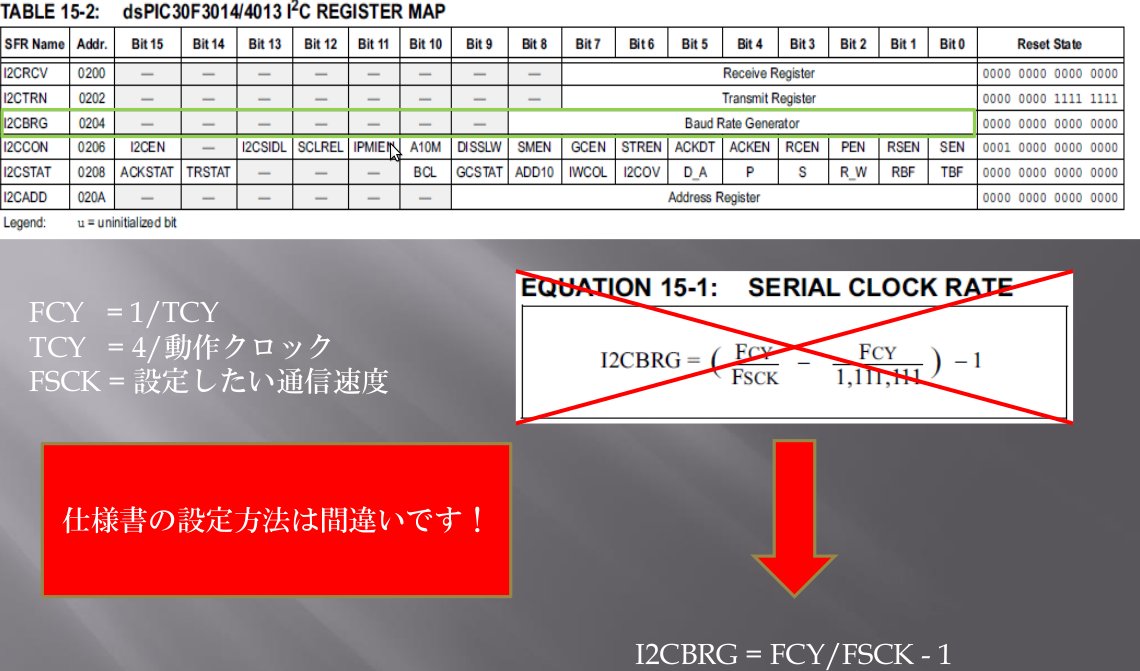
I2CBRG
通信速度の設定を行います。
400kHzバスで動作している場合、I2Cの仕様上スルーレート制御が必要となります。
I2CCON<9>がクリアされると、スルーレート制御はアクティブになります。
(注) その他のバス速度では、スルーレート制御は不要でDISSLWを設定する必要があります
I2C入出力設定に関する注意点
バスオペレーションに使用されるクロック(SCL)ピンとデータ(SDA)ピンはモジュールソフトウェアによってピンのポート入出力を制御しなくても、モジュールがポートの状態と方向をオーバーライドします。
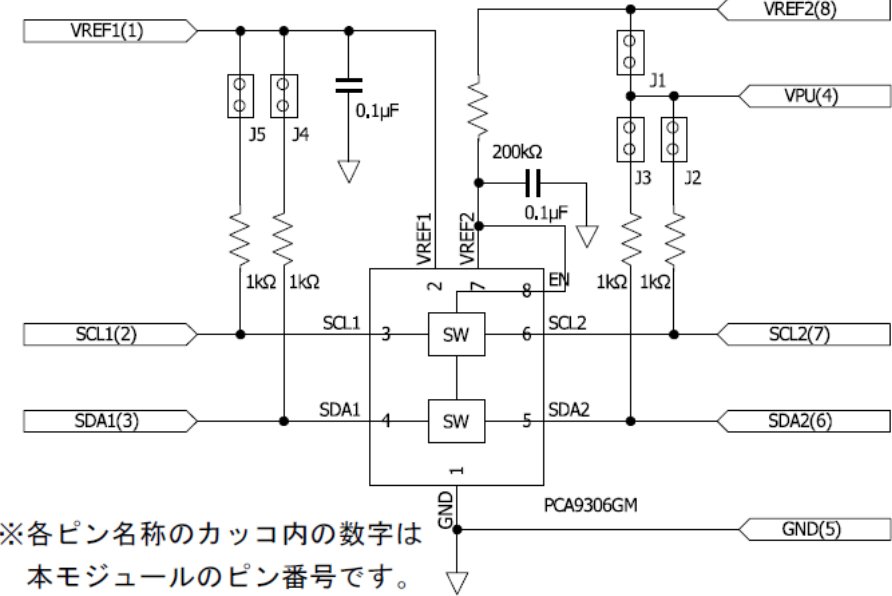
電圧差に関する注意点
dsPIC30F3014 -> 5V駆動
IMU3000 -> 3.3V駆動
駆動電圧が異なるためI2Cバス用双方向電圧レベル変換モジュールを使いましょう。
以上でI2Cの基礎に関する解説を終了します。
次回は実際にジャイロセンサを動かすサンプルプログラムを紹介する予定です。
blog comments powered by Disqus
Published
Category
SPPBoardTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート