URG + hector_slamで地図を描いてみた
開発環境
OS
- Ubuntu12.04
ROS ver
- Hydro
距離センサ
- UTM-30LX
前回はXtionでやりましたが今回は素直にURGを使用します。
hokuyo_nodeを使いますのでまだインストールしていない方は次のコマンドをどうぞ
$ sudo aptitude install ros-hydro-hokuyo-node
hokuyo_nodeを起動するとsensor_msgs/LaserScanというメッセージを/scanというトピック名で配信していることがわかります。
/scanは/laserフレームに固定されているようなのでこれを/base_frameの子として登録すれば準備は完了です。
launchファイルを作ったのでGitHubを参照してください。
$ roslaunch hector_hokuyo.launch
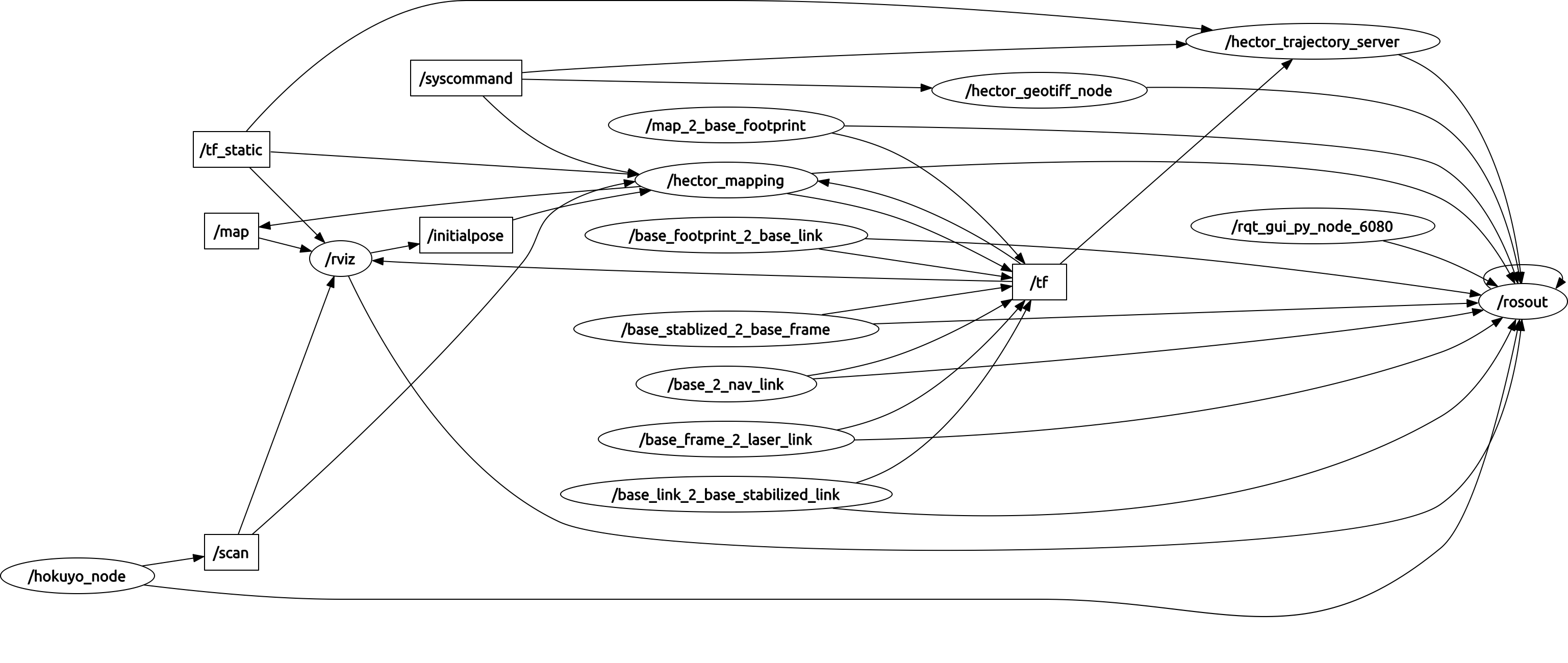
システム図は以下の通り
千葉工業大学の2号棟18Fを歩いて綺麗な地図が完成
blog comments powered by Disqus
Published
14 April 2014
Category
ROSTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート