ros_controlでノード間通信に依らずロボット間のハードウェアの違いを吸収する
この投稿はROS Advent Calendar 2014の19日目の記事です。
はじめに
ros_controlを使用することでROSのノード間通信に依らずロボット間のハードウェアの違いを吸収し、モジュールの可搬性を確保することが可能です。
元はpr2_mechanismとして開発されていたものをPR2以外のロボットにも適用可能なように一般化したものです。
リアルタイム性のある制御コントローラを作成してシステムを構築できることが強みであり、詳しくはこちらを参照してください。
また、シミュレータと実機で共通のコントローラを使用することも可能で、ros_controlの概要と合わせてこれからその方法を解説します。
http://wiki.ros.org/ros_control
ros_controlの概要
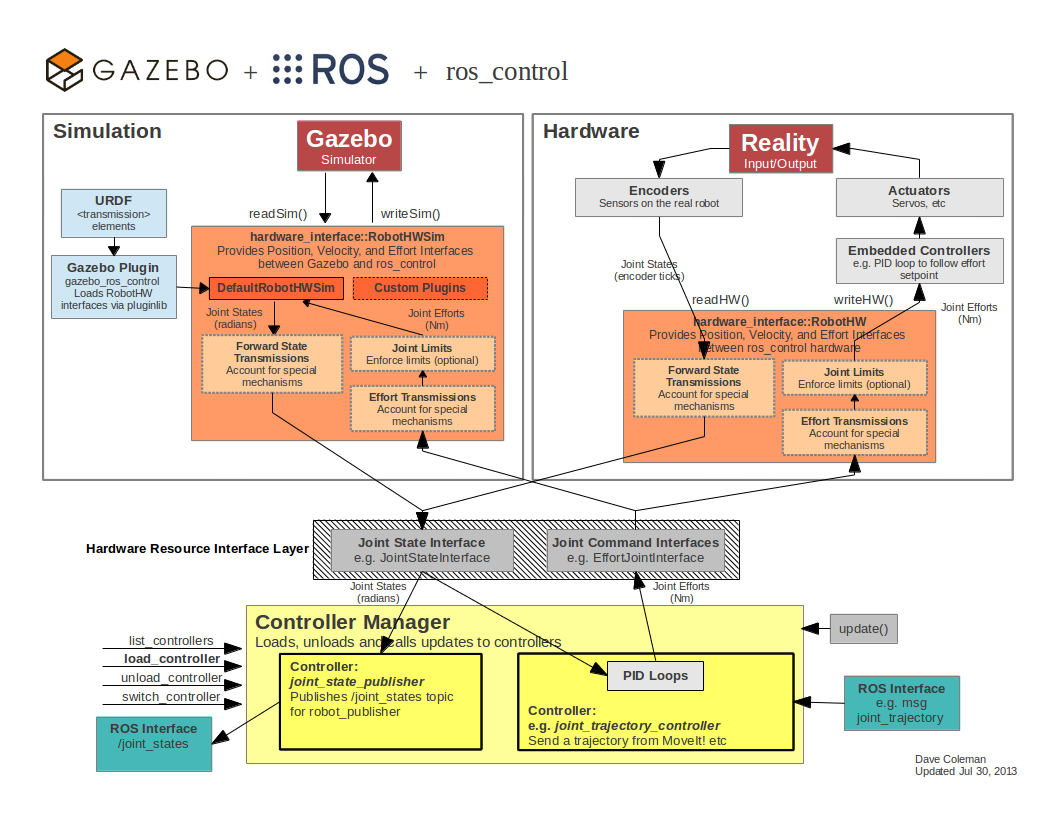
大まかにコントローラ、ハードウェアインタフェース、トランスミッションの三つの要素から構成されます。
1. Controllers
コントローラはプラグインとして入れ替えが可能で、シミュレータと実機との互換性も確保されています。
プラグインは以下の種類がros_controllersに用意されています。
effort_controllers
- joint_effort_controller
- joint_position_controller
- joint_velocity_controller
joint_state_controller
- joint_state_controller
position_controllers
- joint_position_controller
velocity_controllers
- joint_velocity_controllers
もちろん独自のプラグインも作成可能で詳細はこちら
2. Hardware Interfaces
ロボットに必要なハードウェアインタフェースを以下のリストから使用することができます。(独自のインタフェースを作成する方法はこちら)
Joint Command Interfaces
- Effort Joint Interface
- Velocity Joint Interface
- Position Joint Interface
Joint State Interfaces
Actuator State Interfaces
Actuator Command Interfaces
- Effort Actuator Interface
- Velocity Actuator Interface
- Position Actuator Interface
Force-torque sensor Interface
IMU sensor Interface
3. Transmissions
アクチュエータと関節との関係を記述するためのものでギア比や平行リンク等の概念をモデル化することができます。
詳細はこちら
ロボットのモデルを定義
差動二輪型のロボットに適用した場合のURDFの一例を示します。(細かい部分は省略)
モデルを記述するためにsample_robot.xacroというファイルを作成し、まずは回転ジョイントを二つ定義します。
sample_robot.xacro
<robot name="sample_robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
...
<joint type="revolute" name="left_wheel_hinge">
<origin xyz="0 ${wheel_dist} ${wheel_height}" rpy="0 0 0"/>
<child link="left_wheel">left_wheel</child>
<parent link="base_link">base_link</parent>
<axis xyz="0 1 0"/>
<limit effort="100" velocity="100.0" lower="-500" upper="500" />
</joint>
<joint type="revolute" name="right_wheel_hinge">
<origin xyz="0 -${wheel_dist} ${wheel_height}" rpy="0 0 0"/>
<child link="right_wheel">right_wheel</child>
<parent link="base_link">base_link</parent>
<axis xyz="0 1 0"/>
<limit effort="100" velocity="100.0" lower="-500" upper="500" />
</joint>
...
</robot>
アクチュエータと関節との関係は以下のように記述できます。
sample_robot.xacro
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="left_wheel_hinge">
<hardwareInterface>VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="left_motor">
<hardwareInterface>VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="tran2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="right_wheel_hinge">
<hardwareInterface>VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="right_motor">
<hardwareInterface>VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
これをlaunchファイルで読み込んでrobot_descriptionパラメータとして共有しましょう。
sample_robot_driver.launch
<param name="robot_description"
command="$(find xacro)/xacro.py '$(find sample_robot_description)/urdf/sample_robot.xacro'" />
コントローラの読み込み
使用するコントローラの設定を記述します。
sample_robot.yaml
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 100
sample_robot:
type : "diff_drive_controller/DiffDriveController"
left_wheel : 'left_wheel_hinge'
right_wheel : 'right_wheel_hinge'
publish_rate: 100
pose_covariance_diagonal : [0.00001, 0.00001, 1000000000000.0, 1000000000000.0, 1000000000000.0, 0.001]
twist_covariance_diagonal: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
wheel_separation_multiplier: 1.0
wheel_radius_multiplier : 1.0
cmd_vel_timeout: 20
base_frame_id: base_link
linear:
x:
has_velocity_limits : true
max_velocity : 0.9 # m/s
min_velocity : -0.9 # m/s
has_acceleration_limits: true
max_acceleration : 1.7 # m/s^2
min_acceleration : -0.4 # m/s^2
angular:
z:
has_velocity_limits : true
max_velocity : 0.5 # rad/s
has_acceleration_limits: true
max_acceleration : 1.5 # rad/s^2
DiffDriveControllerはVelocityJointInterfaceが設定されている回転ジョイントをleft_wheelとright_wheelに指定することでgeometry_msgs::Twistメッセージから必要な車輪の回転数を計算し、モデルの進んだ量からnav_msgs::Odometryメッセージのパブリッシュとtfの発行も行われます。
controller_managerに設定を読み込ませます。
sample_robot_control.yaml
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find sample_robot_control)/config/sample_robot_control.yaml" command="load"/>
<!-- load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" args="sample_robot joint_state_controller">
</node>
RobotHW
コントローラへの入出力と実機への入出力関係を管理するためRobotHWを継承したSampleRobotHWを定義する。
sample_robot_driver.cpp
class SampleRobotHW : public hardware_interface::RobotHW
{
public:
SampleRobotHW(){
pos_[0] = 0.0; pos_[1] = 0.0;
vel_[0] = 0.0; vel_[1] = 0.0;
eff_[0] = 0.0; eff_[1] = 0.0;
cmd_[0] = 0.0; cmd_[1] = 0.0;
hardware_interface::JointStateHandle state_handle_1("right_wheel_hinge", &pos_[0], &vel_[0], &eff_[0]);
jnt_state_interface_.registerHandle(state_handle_1);
hardware_interface::JointStateHandle state_handle_2("left_wheel_hinge", &pos_[1], &vel_[1], &eff_[1]);
jnt_state_interface_.registerHandle(state_handle_2);
registerInterface(&jnt_state_interface_);
hardware_interface::JointHandle vel_handle_1(jnt_state_interface_.getHandle("right_wheel_hinge"), &cmd_[0]);
jnt_vel_interface_.registerHandle(vel_handle_1);
hardware_interface::JointHandle vel_handle_2(jnt_state_interface_.getHandle("left_wheel_hinge"), &cmd_[1]);
jnt_vel_interface_.registerHandle(vel_handle_2);
registerInterface(&jnt_vel_interface_);
}
ros::Time getTime() const {return ros::Time::now();}
ros::Duration getPeriod() const {return ros::Duration(0.01);}
void read(){
ROS_INFO_STREAM("Commands for joints: " << cmd_[0] << ", " << cmd_[1]);
}
void write(){
//Update pos_ and vel_
}
private:
hardware_interface::JointStateInterface jnt_state_interface_;
hardware_interface::VelocityJointInterface jnt_vel_interface_;
double cmd_[2];
double pos_[2];
double vel_[2];
double eff_[2];
};
SampleRobotHWのコンストラクタではJointStateInterfaceとVelocityJointInterfaceを使うための初期設定が記述されています。
cmd_[0]とcmd_[1]にはそれぞれright_wheel_hingeとleft_wheel_hingeへの速度の指令値がコントローラ(ここではDiffDriveController)によって更新されており、read関数ではこれを元に実機の車輪を駆動します。
また、実機からのセンサデータを元にwrite関数でpos_とvel_を更新することでJointStateInterfaceを介してコントローラに伝達されます。
DiffDriveControllerはこの情報からnav_msgs::Odometryメッセージのパブリッシュとtfの発行を行います。
main文は以下のようになります。
sample_robot_driver.cpp
int main(int argc, char **argv){
ros::init(argc, argv, "sample_robot");
ros::NodeHandle nh;
SampleRobotHW robot;
controller_manager::ControllerManager cm(&robot, nh);
ros::Rate rate(1.0 / robot.getPeriod().toSec());
ros::AsyncSpinner spinner(1);
spinner.start();
while(ros::ok()){
robot.read();
cm.update(robot.getTime(), robot.getPeriod());
robot.write();
rate.sleep();
}
spinner.stop();
return 0;
}
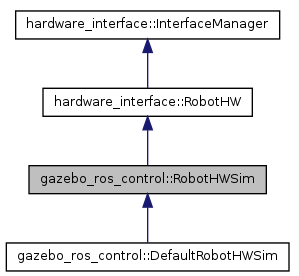
RobotHWSim
実機の時はRobotHW, シミュレータの時はRobotHWSimを継承したクラスをそれぞれ定義して使用します。
RobotHWSimはgazeboへはプラグインとして読み込ませる必要があります。
また、シミュレータ用には標準実装のDefaultRobotHWSimが用意されていて振る舞いを拡張する必要がない場合はこちらを使用します。
因みに継承関係を以下の図のようになっています。
sample_robot_hw_sim.cpp
class SampleRobotHWSim : public gazebo_ros_control::RobotHWSim
{
private:
static const double max_drive_joint_torque_ = 20.0;
double cmd_[2];
double pos_[2];
double vel_[2];
double eff_[2];
gazebo::physics::JointPtr joint_[2];
hardware_interface::JointStateInterface js_interface_;
hardware_interface::VelocityJointInterface vj_interface_;
public:
bool initSim(const std::string& robot_namespace, ros::NodeHandle model_nh, gazebo::physics::ModelPtr parent_model,
const urdf::Model* const urdf_model, std::vector<transmission_interface::TransmissionInfo> transmissions)
{
pos_[0] = 0.0; pos_[1] = 0.0;
vel_[0] = 0.0; vel_[1] = 0.0;
eff_[0] = 0.0; eff_[1] = 0.0;
cmd_[0] = 0.0; cmd_[1] = 0.0;
joint_[0] = parent_model->GetJoint("right_wheel_hinge");
joint_[1] = parent_model->GetJoint("left_wheel_hinge");
js_interface_.registerHandle(
hardware_interface::JointStateHandle("right_wheel_hinge", &pos_[0], &vel_[0], &eff_[0]));
js_interface_.registerHandle(
hardware_interface::JointStateHandle("left_wheel_hinge", &pos_[1], &vel_[1], &eff_[1]));
vj_interface_.registerHandle(
hardware_interface::JointHandle(js_interface_.getHandle("right_wheel_hinge"), &cmd_[0]));
vj_interface_.registerHandle(
hardware_interface::JointHandle(js_interface_.getHandle("left_wheel_hinge"), &cmd_[1]));
registerInterface(&js_interface_);
registerInterface(&vj_interface_);
return true;
}
void readSim(ros::Time time, ros::Duration period){
for(int i=0; i < 2; i++){
pos_[i] += angles::shortest_angular_distance(pos_[i], joint_[i]->GetAngle(0).Radian());
vel_[i] = joint_[i]->GetVelocity(0);
eff_[i] = joint_[i]->GetForce((unsigned int)(0));
}
//Add Custom Code
}
void writeSim(ros::Time time, ros::Duration period){
for(int i=0; i < 2; i++){
joint_[i]->SetVelocity(0, cmd_[i]);
joint_[i]->SetMaxForce(0, max_drive_joint_torque_);
}
//Add Custom Code
}
};
typedef boost::shared_ptr<SampleRobotHWSim> SampleRobotSimPtr;
PLUGINLIB_EXPORT_CLASS(SampleRobotHWSim, gazebo_ros_control::RobotHWSim)
RobotHWSim::initSim, RobotHWSim::readSim, RobotHWSim::writeSimは純粋仮想関数として定義されているので派生クラスでオーバーライドする必要があります。
SampleRobotHWSimはpluginlibを使用することによりプラグインとして生成します。
sample_robot_hw_sim_plugins.xml
<library path="lib/libsample_robot_hw_sim">
<class
name="SampleRobotHWSim"
type="SampleRobotHWSim"
base_class_type="gazebo_ros_control::RobotHWSim">
<description>
TODO
</description>
</class>
</library>
package.xml
<export>
<gazebo_ros_control plugin="${prefix}/sample_robot_hw_sim_plugins.xml"/>
</export>
生成したSampleRobotHWSimを読み込むにはsample_robot.xacroに以下のコードを追加します。
sample_robot.xacro
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotSimType>SampleRobotHWSim</robotSimType>
</plugin>
</gazebo>
sample_robotのモデルをgazeboに読み込ませます。
sample_robot_gazebo.launch
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model sample_robot -param robot_description"/>
ros_controlを使うことで実機とシミュレータ互換のシステムが簡便に構築可能です。
また、各要素はプラグインとして入れ替えが可能なので、可搬性を保ちつつそれぞれのロボットのハードウェアに合わせた処理を実装することができます。
blog comments powered by Disqus
Published
Category
ROSTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート