ヒューマノイドリーグから見たロボカップの歴史
はじめに
2015年のロボカップ世界大会が中国で7月19日から開催されることをご存知ですか?
今まで、内輪で盛り上がっていただけで情報配信を積極的に行ってこなかったため、そもそもこの大会自体のことがわからないという人が大多数ではないでしょうか。
日本での認知度が低いこの大会も世界に目を向けると数多くの国や地域から人が集まり、活発に技術の交流が成されてきました。
そこで、大衆向けの記事よりは技術者にも内容が伝わりやすいように少しだけ技術寄りの視点で、私が参加していたヒューマノイドリーグを中心にロボカップについてまとめてみました。
ロボカップの概要
1993年に日本の研究者らにより提唱され、スイスにある国際委員会を中心に1997年から毎年開催されている。
「2050年までにヒューマノイドロボットのサッカーチームでFIFAワールドカップチャンピオンチームに勝利する」というシンプル且つ壮大な目標を設定している国際的なランドマークプロジェクトである。
ランドマークプロジェクトとは、アポロ計画やコンピュータチェス等に代表されるように掲げられた大きな目標の解決に大勢で取り組むことにより生み出された技術を社会に還元することを目的としたものだ。
ロボカップも競争から生まれる技術を公開・共有することにこそ本質があり、試合後には情報共有のためのカンファレンスが開催される。 大会そのものの意義に関してはロボカップ戦略: 研究プロジェクトとしての意義と価値という学会誌を参照していただきたい。
ロボカップにも基軸となるコンセプトがいくつか存在し、要素毎に難易度を分散させるため様々な条件のリーグがデザインされている。以下、個人的に重要だと思われるものを挙げる。
1. 環境が既知でない場合における意思決定
将棋などのボードゲームにおける行動のプランニングを想像して欲しい。 これらの問題はゲーム内における全ての環境を常に観測出来るのに対して、ロボカップのグローバルヴィジョンを用いないリーグではロボットやボールの状態を完全に把握することは困難である。
2. 行動の曖昧さによる問題
計算機がロボットという実体を伴うことによって生じる行動の曖昧さが問題になる。
歩行や各種モーション等は決定論的に扱うことはできず、自律ロボットを使用するこの大会においてロボットは自らの過ちを認識出来なければならない。
3. 独立したエージェント間による協調動作(分散制御)
集中制御用のコンピュータが禁止されているリーグでは、それぞれ完全に独立したエージェント間で協調動作を実現させる必要がある。各ロボットに搭載されたセンサのみでは味方ロボットの状態や行動を完全に予測することは難しく、相手ロボットではより困難になる。
また、オンボードのコンピュータを用いることにより、計算リソースが大きく制限される点はAIの視点から見て重要な要素である。
これらの内いずれかは多くの自律ロボットにも共通して当てはまるものではないだろうか。また、AIの分野としても興味深い課題を提示するものである。
なぜヒューマノイドなのか?
ヒューマノイドロボットをなんらかの問題に適用する場合その存在意義は問われ続けてきた。 場面によってその答えは異なるがロボカップにおいてもこの議論を避けることはできないだろう。
なぜロボカップの最終目標にヒューマノイドという制約が課されているのかについて理解する上でこの大会の置かれている特殊な立場を理解する必要があると考える。
まず、2050年までという長期的なプロジェクトである関係上何世代にも渡り技術者を惹きつけるだけのシンプル且つ有意義な課題を設定することは必要不可欠であり、それが2050年までに人にサッカーで勝利するという目標設定に繋がった。 因みにかつての私もロボカップの掲げる夢に魅了されこの道を志した一人だ。 加えて、多くのロボットコンペティションと異なるのは人間と対決するという課題設定である。 近いうちにも後述する中型リーグのようなある程度の大きさの車輪型ロボットのチームを用いたなら人間に勝利することは出来るかもしれない。 しかしそれは人間を遥かに凌ぐフィジカルによるものだ。または、サッカーという固有のタスクに特化した形態のロボットを作成した場合はより人間と比べて運動能力を初め様々な点で優位に立てることだろう。 しかし、そのような形での勝利はロボカップの目指しているものではない。サッカーというタスクを解くためのAI/ロボット技術を育てることが目的ではないからだ。 人の形・人の持っている機能という制約をロボットに課したのは、将来的に人間と対峙することを考えれば一つの妥当な解ではある。
因みに全リーグ使用するのはカメラのみでLRF等は禁止されている。ここまでする必要があったのかどうかはわからないがこれも運営側のこだわりの現れなのだろう。
各リーグの紹介
大きく以下の3つに分類される。
(1) ロボカップサッカー
(2) ロボカップ@ホーム
(3) ロボカップレスキュー
この記事ではロボカップの中心である1に関して取り上げる。2と3はロボカップの競技としての範囲を拡大するために用意されたもので、原発内の調査のため実際に使用されたQuinceもロボカップレスキュー出身のロボットである。また、教育に重点をおいたロボカップジュニアという枠組みも存在するがここでは解説を行わないものとする。
ロボカップサッカーは更に以下の5つに別れる。各リーグの概要とそれぞれの役割も合わせて解説する。
シミュレータリーグ
実機を伴わないため全リーグ中最もゲームの戦略・戦術が成熟しており、マルチエージェントシステムに関して優秀な論文を多数輩出している。1チーム11体のプログラム的に独立したエージェントを用いて試合は行われ、行動の曖昧さや情報の意図的な制限も行われる。(試合は2Dまたは3Dの形式で行われる)
エージェント間のコミュニケーションに使用される通信は確実に相手に届くことが保証されておらず、視野角は制限され、自己位置や観測したボールにもノイズが追加されている。
ただし、このリーグでソフトウェア的にシミュレートされたノイズは現実のロボットが抱えるノイズを十分に考慮したものではない。 例えば、ロボットの首の板金が激しく損傷しカメラの取り付け位置がズレた場合や脚部が故障し歩行指令を正しく実行出来ない状態に陥った場合を考えてみればわかりやすい。これらはランダムノイズでは表現出来ない定常的な状態変化をもたらすが、これを考慮しないことによりコンセプト2で述べた行動の曖昧さに対する難易度は軽減される。
小型リーグ
1チーム6台の小型車輪ロボットを用いて6m x 4m 程のフィールドで試合を行う。
各ロボットには識別用のマーカが取り付けられておりグローバルヴィジョンを介してロボットやボールの位置等が得られる。また、集中制御用のコンピュータを用いてチームの行動を計画し、無線でロボットに指令が送られる。グローバルヴィジョンとロボット間の制御を集中制御出来る点で他のリーグと大きく異なるが、これもまた面白い課題設定ではある。 このリーグで培われたマルチロボットのフォーメーションに関するAI技術が実際の製品に応用されたというのは有名な話である。 今も某社の倉庫で動きまわっていることだろう。
これも余談になるが、多数の無線が飛び交うロボカップの環境ではpingを打ってから帰ってくるまでに10秒かかるなんてことが毎年起こる。集中制御を行うこのリーグは無線の遅延に関する影響が最も大きく、不要な電波を飛ばしている人がいないかどうかチェックするために会場を見回っている参加者を時折見かける。
中型リーグ
1チーム5台の中型車輪ロボットを用いて18 x 12m 程のフィールドで試合を行う。
小型リーグと同様、車輪型ロボットを用いるが各ロボットに搭載されたセンサのみで環境を認識し、状況判断を行う。画像処理用のカメラとして全方位カメラを使用可能である。
ロボットの大きさや動きの面で現在、最も迫力のあるリーグで人間対ロボットのエキシビジョンマッチも時折開催される。ただし、フィジカルの面ではロボットの方が優勢で試合としては成立しづらい。(基本的に転倒しない)
標準プラットフォームリーグ
1チーム5台のNaoを用いて試合を行う。標準のロボットを使用する利点として純粋なソフトウェアの優劣で勝敗が決められること、各チームのソースコードを共有することが容易でそれが技術の発展を促進されることが期待できる。最近では優勝チームのソースコードがROSのパッケージとして公開された。
ヒューマノイドロボットをサッカーの用途で使用するとどうしても重心が支持多角形内から出る場面が発生してくる。転倒を考慮しなければならない分シュートなどの動作に新たな不確定要素が加わる点で車輪ロボットと異なる。
視野角に制限があるカメラなので視野外に未知領域が発生し、意図的な探索行動をプレイ中に行う必要がある。また、各チームの歩行の実装に依存するとはいえ一般的にヒューマノイドロボットは車輪ロボットよりもオドメトリの精度が落ちる。 その上、歩行時の振動でカメラの情報に激しいノイズが乗っているかもしれない等、総じて得られる情報がより曖昧なものとなっている。
障害物の認識に超音波センサを使用することができる。
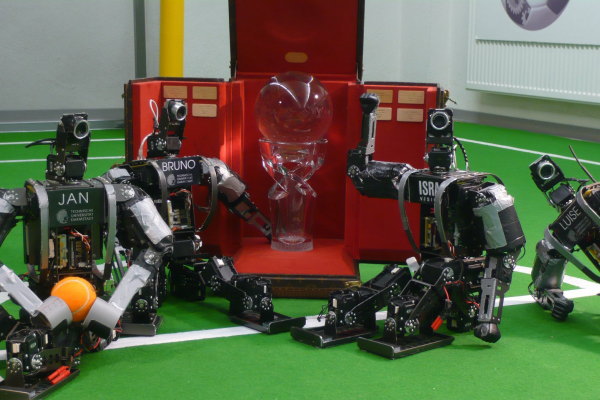
ヒューマノイドリーグ
ロボカップの最終目標を達成するため、コンセプト1 ~ 3の観点から見て全リーグの困難な要素を集めて作られたリーグ。 ロボカップ最高の栄誉とされるルイ・ヴィトンカップはこのリーグにのみ存在する。このリーグはロボットのサイズでKid・Teen・Adultの3階級に分かれており、障害物ドリブル、スローイン、パスプレー等の技術力を競うテクニカルチャレンジと試合形式の両方の得点の合計(最大50 + 50)を競う。最終的には各チームの投票で3階級のチームの中からベストヒューマノイドを1チーム選出し、そのチームへルイ・ヴィトンカップが授与される。(基本的には最もポイントが高いチームを選ぶ)
基本的な性質は標準プラットフォームリーグのものを引き継ぐが、ハードウェアに大きな制約が課される点が異なる。特にロボットの重心・足裏の大きさ、起き上がり時に重要となる腕の長さ等は人間の比率に従うように毎年レギュレーションで難易度が引き上げられていく。2050年へ向けたロードマップに従いルール変更が頻繁に行われる。
ヒューマノイドリーグの歴史
ルールの遷移とその年の注目チームを参加チーム最多のKidサイズを中心にまとめた。ここではとても全てを紹介することは出来なかったが、他にも面白いチームはたくさんあるので気になる場合は各自調べて欲しい。 ヒューマノイドリーグのホームページはこちら
因みに基本的なルールは三階級とも同じでよりサイズが大きくなるにつれてフィールド・ボール・ゴールも大きくなりフィールドに出せる機体数は少なくなる。
また、各チームの機体の運動性能(主にキック力や歩行速度)が向上する度に毎年少しずつフィールドが大きくなる傾向にある。
2014年度時点で大会初期に比べるとKidサイズを中心にチームプレー等が見られるようになり成長が見られるがAdultサイズのようにより大きなサイズでは動きが緩慢でまだまだ試合としては成立しずらいのが現状だ。
2002年 ~ 2003年
大抵のロボットが歩行出来ないというある意味衝撃的なスタートを切った。優秀なロボットのみボールを蹴ることが出来た。
2004年 ~ 2008年
2006年からようやく2対2の試合が成立し始め、2008年には3対3へと機体数が増やされ全方位カメラが廃止された。
ROBO-ONEで結果を残していた坂本元氏のはじめロボットの提供を受けたCITBrainsとDarmstadt Dribblersの2チームが大会で結果を残したことを受けて、多くのチームがその設計を解析し多数のクローン機体が生まれた。 この時期のヒューマノイドリーグの参加チームにとって、当時ROBO-ONE最高峰の機体であったはじめロボットから学ぶべき点は多く、ヒューマノイドのメカニズムに関するノウハウを持たないチームを中心に良い手本となっていた。
- Team OSAKA

2004年から2008年までの5年間優勝を独占したヴイストンを中心として構成された産学連携チーム。 高い技術力で黎明期のヒューマノイドリーグをリードし続けていた。 高い機動力とシュート力が特徴のチームだが、歩行を全てモーションとして分割し手作業で調整しているというのには驚いた。(おそらくそのような職人芸を好むのはこのチームくらいではないか) また、デザインにもこだわりがあるようで専任のデザイナを起用していた点も特徴である。
転倒時の衝撃吸収にはシリコーンゲルという素材を用いていて、うまく機体のデザインと融合しており無駄がない。
チームに関する詳細はこちらのリンクを参照。
2009年 ~ 2010年
- Darmstadt Dribblers
2006年から参加しているドイツのDarmstadt校のメンバで構成されたチームで2009年にはルイヴィトンカップを獲得した。Team OSAKAとは毎年激しい戦いを繰り広げていた。
はじめロボットをベースとすることで大会初期にはハードウェア的なアドバンテージを得ていた。(また、ソフトウェア開発に注力することができた)
IMUからの姿勢情報とカメラの同期を安定させる作業に数年間費やした結果、自己位置推定の性能等が格段に向上したとメンバが語っていた。その言葉通り、機体の調子がいい時には3機体で完全にボールを囲みながらドリブルを行うフォーメーションプレーや、狭いゴールエリアを把握した上でのキーパのスローインプレー等高度な戦略を取り入れていた。
コート全域をカバーするシュート力と的を外さない高いシュート決定率で大抵の試合を10分間の試合前半以内にコールド(10点以上の差)で終わらせることが出来る。
しかし、ピーク時の機体性能を向上させる目的で推奨電圧12VのMX-28サーボに19V程加えており、試合後半は発熱により大きく運動性能が低下する。また、延長戦はほとんどの機体が稼働不可能となる等、その強さはあまり安定していない。
余談だが、3つの別々のプロジェクトチームが集まっていてだいたい50名程が開発に関わってきたがメンバ間の仲はあまり良くなさそうに見えた。
http://www.dribblers.de/index.en.php
- Nimbro


ドイツのBonn(heinische Friedrich-Wilhelms)校のチームで、大会の初期の頃はKidとTeenサイズに出場、2010年からはTeenサイズに専念しており、同年にルイ・ヴィトンカップを獲得した。白線の交点の形状(T/L/十字)をランドマークとして認識することによりゴールポールやコートの両サイドのポールを使用しなくとも十分な自己位置推定の精度が得られることを示し、他チームよりもいち早くシステムに組み込んでいた。
特にTeenサイズのロボットにはハードウェア的な工夫が多く見られ、歩行の安定性を向上させる目的で平行リンクを採用している。バネに関する経験値も高く脚部に自重をキャンセルするためのバネ採用や、腰にバネを入れることで転倒時にはそれが働き衝撃を吸収するメカニズムとなっている。
安定性の高い機体でKid・Teenサイズ共に活躍し、Teenサイズでは長年王者であり続けたが2014年度に現れた後述するBasetというチームには大きく遅れをとる結果となった。
TeenサイズのオープンプラットフォームとしてNimbro-OPをリリースしている。全てのソフトウェアをROSパッケージとして公開する等、オープンソースの面でも貢献した。メカニズムを簡素化するためにこちらのロボットはシリアルリンクを採用している。
2011年 ~ 2012年
オープンプラットフォームDARwIn-OPの開発元のチームが優勝したことを受けて、リーグ内でプラットフォームの統一化が起こり始めた時期である。ROBOTIS社の元で販売されるDARwIn-OPにはダイナミクセルサーボが採用されており、そのシェアはより確実なものとなった。また、初期位置ズレ等の観点から参加者がアブソリュートエンコーダの使用を明確に意識し始めていた。
- Team DARwIn

米国立科学財団(NSF)の支援の下、バージニア工科大学ロボット工学研究所RoMeLa、ペンシルバニア大学、バデュー大学の共同プロジェクトとしてオープンプラットフォームDARwIn-OPを開発した。 その際、ROBOTIS社より資金と技術の提供を受ける。
参加した年である2010年は振るわなかったもののDARwIn-OPを実践投入した2011年から2013年にかけて、試合形式のサッカーで3年間優勝し続けた。歩行とキックモーションをシームレスに結合することによりボールに近づくと瞬時に攻めに転じることができる。高い機動力でボールにいち早く近づき相手のゴールに向かってボールを転がしていくプレイスタイルで試合のテンポを奪っていく。出来のいいハードウェアで結果を残したが2013年は、より性能の良いクローン機等が現れ苦しい戦いとなった。また、試合での強さを追求した結果の低身長・可動範囲の自由度の低さがアダとなりテクニカルチャレンジではほとんど得点することが出来ず、ルイ・ヴィトンカップを手にするまでには至らなかった。
標準プラットフォームリーグ(SPL)の方には2003年から参加しており、SPLで普及している標準ライブラリ等の多くの資産をこちらのリーグに持ち込んだ。
https://fling.seas.upenn.edu/~robocup/wiki/index.php?n=Main.About
2013年
従来まで青色と黄色で各ゴールが色分けされていたが今年から黄色に統一、自己位置推定のランドマーク用にコートの両サイドに設置されていたポールが廃止された。これに伴い完全にコートが左右対称となったため新ルールにうまく対応出来なかったチームのオウンゴールが時折見られるようになった。この頃になると大会開催当初に比べてオンボードコンピュータの性能は大幅に向上し、ラインナップも豊富になった。優秀なベアボーンPCが多数登場したことを受けて、ハードウェア周辺の技術力が低いチームを中心に普及し始めた。また、去年まではDARwIn-OPのシェアが更に拡大するかと思われていたが今年から様子が変わってきた。というのもDARwIn-OPを上回る運動性能を持つロボットが現れ大会で結果を残すようになってきたことやジャイロセンサのレンジの問題で転倒後に自己位置の方位が反転しオウンゴールするチームが相次いだのが要因の一つだ。変化の激しいこのリーグにおいて数年前にリリースされたこの機体は時代遅れに成りつつあった。
- AUTMan

イランのAmirkabir大学のチームで、この年から頭角を表した。システム的には粗削りでロボット間の協調動作等は全く出来ていないが大会随一の歩行速度とDarmstadt Dribblersを彷彿とさせるキック力でこの年の試合で準優勝に輝いた。方位の推定に磁気センサを使用するのが特徴でセットアップ時には方角が描かれたマットの上にロボットを載せてセンサ値のキャリブレーションを行っていた。これにより大会中一度もロボットの方位が反転(逆攻め)を行うことはなかった。 また、サーボのコンプライアンスマージンをやや大きめに設定しその分ジャイロフィードバックを効かせて歩行させていた。こうすることで見た目上はふらふらとした歩行に見えるが足の着地をソフトにして姿勢が多少崩れても転倒を防ぐ効果が見られた。加速時には体が仰け反っていて倒れそうなのに倒れないという歩行が見ていて面白い。
決勝でのTeam DARwIn戦は、前半こそ完全にこのチームのペースでそのまま優勝するかのように思えたが、機体トラブルで後半はフィールドに出せるロボットの数が少なくなり逆転負けとなった。
- EROS
インドネシアのチーム。Team DARwInと対戦し予選敗退したものの激しい戦いを繰り広げて高い注目を集めた。DARwIn-OPのクローン機体だが一回り大きく、運動性能も上回っている。システム的にはまだ荒削りではあるがこの年の歩行速度としては最速で0.6m/s以上は出ていた。(因みにこの年のCITBrainsが0.2m/s程)
サイドキックやバックキック等動きのバリエーションも豊富で飛距離はコート全域をカバーする点でもDARwIn-OPと大きく異なる。 両チームとも転倒後に時折逆攻めが発生し、結局この泥試合を制したのは他の安定性で上回ったTeam DARwInだったが実力はほとんど変わらなかった。
2014年
1チーム4機体までフィールドに出せるようになり、フィールドのサイズは去年の2倍である9m x 6mに変化した。遂に3階級のフィールドサイズが統一され、これにより従来よりも機体の安定性とチームプレーに優れたチームが結果を残す年となった。また、Kid・Teen・Adultの三階級に存在するサイズ制限(主に身長)を一部被らせることによりKidとTeen、TeenとAdult兼用の機体が作成出来るようになった。これに伴いKidサイズの最大身長は60cmから90cmへと引き上げになった。より大きなサイズへの移行を促すという運営側の狙いであり、二階級兼用の新機体が結果を残す等リーグの様子にも大きな変化をもたらした。
- ZJUDancer

中国のZhejiang大学のチームで、長い期間この大会に参加している。初期の頃ははじめロボットの構成を参考にし独自の進化を遂げてきた。
歩行の専門家による安定した歩行が強みであり、足裏の四隅に取り付けた滑り止めも着地時の安定性を向上させるのに寄与している。
ピークの性能はそれほど高くないが4機体を長くフィールドに出し続けられる安定性とロボット間の連携動作に優れていた。
- CITBrains

千葉工業大学を中心とした産学連携チームで、技術力を競うテクニカルチャレンジとサッカーゲームの両方を合わせると参加した年の2006年から2014年までの全ての年で3位以内の入賞を収めている。(しかし初めの方はゲーム形式での勝利は無く、8年間掛けてゆっくりと成績を上昇させていった)
千葉工業大学のロボット学科創設の年、一人の生徒の「ロボカップで世界一になりたい」という夢に応える形でプロジェクトが発足した。当初は何もかもが手探りで坂本元氏への弟子入り(?)から始まった。
初期にははじめロボットの提供を受けその後、後継機を共同開発する流れとなった。
チームの成り立ちについてはこちらのRoboCupを通じた学びと世界一位までの取り組みという文献を参考にしていただきたい。 学科と共に成長してきたこのチームの新設学科故の勢いと苦悩が述べられている。 学部1年次の生徒と教授だけで始まり、メンバが大学院に入るまでが最も大変な時期だった。世界大会では社会人 or PhDの学生が中心というチーム構成が普通で我々のようなチームは非常に珍しかった。学校側からの要請もあり現在では教育としての側面も強い。開発環境の構築や各種インタフェースは学部1年次から開発に関われるようにするため、素人でも容易に扱えるようによく配慮されている。コア技術に関しても豊富な内部向け技術資料とチーム内レクチャーを通して下の世代への技術継承を行う。
ここから余談、2013年度は今まで使用していたジャイロがディスコンになったためアナログデバイセズ製のものに切り替えた。ただ、その際に発生したバグで歩行に対する姿勢フィードバックがうまく働かなくなったがこの年はその状態で出場することになった。この時偶然発見したのが足首ロールのサーボを内側に1、2度程傾けると地面に対して足裏は平行ではなくなるが横方向の外乱に対して強くなる傾向が見られた。気になって歩行時のアトラクタを描いてみたところ別の安定したループへのいわゆる引き込みが発生していた。我々のシステム固有の現象の可能性も十分考えられるがなかなか興味深いデータが取れた。
- Baset

2013年度のAUTManの主力メンバとイランの優秀なエンジニアを集めて新たに構成されてチーム。これによりAUTManの開発能力は大幅に低下し、去年の準優勝チームでありながら予選で姿を消した。 Kid・Teen兼用の90cm級のロボットを新たに開発し実践に投入した。このサイズのロボットにしては動きが早くフィールドを縦横無尽に駆けまわる姿は各チームに衝撃を与え、Kidサイズとしてはキック力・歩行速度の面で歴代最高峰のスペックを叩きだした。Kidの試合は全てコールドで勝ち進んだが準決勝のCITBrains戦では全てのシュートをゴールキーパーに阻まれたのとフィールド内に出し続けられるロボットの数の差で負けた。また、Teenサイズにおいては長年の王者であるNimbroを圧倒して試合で1位を獲得した。
2015年
今まで単色の色付きボールを使用していたが今年から白を基調とした模様入りのボールに変更された。これにより従来の単純な色ベースの認識方法ではうまくボールを認識出来ないだろう。
また、ゴールのポールも白色に変更されたため形状等の情報を考慮しない限り、ボール・ゴール・白線の区別は困難になった。このリーグでは目的を達成するために最低限必要なシンプルなシステム構成が多くのチームで好まれてきた。 このことから、色で物体の識別が出来、大きさが既知なため単眼カメラでも距離を算出するのは容易なためステレオカメラよりも優先して使用されている。ロボット同士が激しくぶつかり合いながらボールを奪い合うサッカーという競技において、どれだけ損傷しても動き続けることが重要であり、カメラ板金の歪みによる影響は確かに単眼カメラの方が抑えられるだろう。
しかし、今回のルール変更により使用するカメラの選択肢としてステレオカメラは十分考えられる。 今年は移行期間なので色ヒストグラムとハフ変換等の円形抽出を組み合わせたボールの認識を行うチームが出てくるのではないかと推測している。また、よりボールの観測が不安定になったことに伴いEKF等のフィルタを用いて位置追跡を行うチームが出てきたとの情報を入手している。 白線とゴールポストの区別に関しては2Dでは難しいかもしれないけどどうだろうか。
フィールドもフラットな緑色のマットから人工芝に変更され、各チームとも歩行の見直しが求められる。 また、これに伴い白線がテープでは無くなったため観測はより困難になった。
大会の屋外開催に向けて大きく舵を切る形となった今回のルール変更。 各チームどのように対策してくるのか楽しみではある。
大会の様子

去年のブラジル大会は世界各国から約40ヶ国、400チーム程度が集まり、数十万人の観客とロボットの試合を通して盛り上がった。
会場では毎年ロボカップに関するグッズの販売やスポンサー企業のデモンストレーションブース等の設置が行われる。
既存の施設を使用するだけでなく、国によっては新たな試合会場がロボカップのために建設される。2013年のオランダ大会ではマキシマ王妃が見学に訪れる等国際的なロボット競技として広く認知されている。
この大会に参加して感じたこと
強く感じたのは、研究施設内で安定して動作していたシステムが実フィールドでも正しく機能するとは限らないということだ。人間ではまず気にならないような会場の環境の些細な変化や敵ロボットという不確定要素が加わることにより、作りの甘い機能程簡単に破綻した。原因としてはおそらく現状のロボット技術と我々の技術的な未熟さの両方が考えられるだろう。問題が起こる度にそれを解決しているチームからノウハウを学びあった。そして時には他のリーグの技術も大いに参考になった。多くの要素技術の複合から成り立つロボットシステムを広い視野から見渡し問題があれば解決し、実フィールドでも頑健に動作するシステムを目指していくその姿はロボットの製品開発の工程そのものであったと、大会を離れてから漸く理解することが出来た。研究室内、工場内という柵を超えたロボット達が我々の生活圏で活躍する未来を実現するためにこの大会は有意義な場を提供しているという実感を得た。ロボカップに限った話ではない、ロボットコンペティションは今までの研究で考慮されてこなかった新たな問題を我々に提示し、世界中のエンジニアがそれに取り組むことによってロボット技術を次のステージへと推し進めることが出来ると確信している。
最後に
もっと技術的に掘り下げた話を入れたかったのですが、ロボカップを知らない人向けに全体を紹介しているとそれだけでかなりの文量になることに気が付きました。
結果薄味の記事になってしまいましたが、もしこの記事を読んでロボカップに興味を持ってくれる人が一人でもいたならばそれほど嬉しいことはありません。 今年の大会はもうすぐですので気になった方はチェックしてみてくださいね。 また、記事に間違い等があるかもしれません。見つけたらプルリクエストを投げていただけると助かります。
blog comments powered by Disqus
Published
Category
RoboCupTags
Profile
千葉工大産のロボットナビゲーションエンジニア
ros-jpの勉強会の主催やロボカップ世界大会優勝チームのリーダをやってました。
badge_description about badge's
総訪問者数
ツイート